बच्चों के लिए ज्वरनाशक दवाएं बाल रोग विशेषज्ञ द्वारा निर्धारित की जाती हैं। लेकिन बुखार के लिए आपातकालीन स्थितियाँ होती हैं जब बच्चे को तुरंत दवा देने की आवश्यकता होती है। तब माता-पिता जिम्मेदारी लेते हैं और ज्वरनाशक दवाओं का उपयोग करते हैं। शिशुओं को क्या देने की अनुमति है? आप बड़े बच्चों में तापमान कैसे कम कर सकते हैं? कौन सी दवाएं सबसे सुरक्षित हैं?
4. /4 बधाई.doc
5. /5 बहुत बढ़िया.doc
6. /6 क्षैतिज.doc
7./23 फरवरी के लिए आर्मी थीम.डॉक पर 7 पहेलियाँ
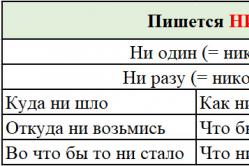
क्षैतिज रूप से:
1. विमान का एक बड़ा कनेक्शन.
3. एक सैनिक जो टैंक पर लड़ता है।
5. इस उद्घोषक को महान की शुरुआत और अंत की घोषणा करने के लिए सम्मानित किया गया था
7. एक युद्धपोत जो परिवहन और व्यापारिक जहाजों को नष्ट कर देता है।
9. अप्रचलित प्रक्षेप्य नाम.
11. आक्रमण के लिए दौड़ते सैनिकों की चीख.
13. जंगल में या अग्रिम पंक्ति में व्यापक रूप से लागू भवन, आमतौर पर महान देशभक्तिपूर्ण युद्ध के दौरान एक आदेश था।
15. पिस्तौल का निशान.
17. युद्ध के बाद के वर्षों में एक लोकप्रिय सोवियत कार का ब्रांड
19. शत्रु क्षेत्र पर उतरने वाले सैनिकों का प्रकार।
21. ट्रैक किया हुआ बख्तरबंद वाहन।
23. सैन्य उपकरणों से: वॉकिंग प्लेटफॉर्म, लोडर।
25. प्रोपेलर के साथ उड़ने वाली मशीन।
26. महान देशभक्तिपूर्ण युद्ध के दौरान लड़ाकू जेट वाहनों का उपनाम।
27. इस पद्धति से सेना को प्रशिक्षण देना।
29. कोसैक रैंक।
31. फायरिंग पॉइंट.
33. पुराने दिनों में वह व्यक्ति जिसे नौकरी पर रखा जाता था या भर्ती किया जाता था।
35. पनडुब्बी का प्रकार.
37. उसके साथ पैराट्रूपर विमान से बाहर कूद जाता है.
39. दुश्मन के लोगों और उपकरणों को हाथ से फेंककर नष्ट करने के लिए विस्फोटक गोला-बारूद की आवश्यकता होती है।
41. लोगों के बीच सैनिकों के जूतों का क्या नाम है?
42. शत्रु के लिए अप्रत्याशित आक्रमण।
43. समूह एरोबेटिक्स।
45. रूसी लोग नाज़ी जर्मनी पर जीत का जश्न किस महीने में मनाते हैं? लंबवत:
2. महान देशभक्तिपूर्ण युद्ध की सबसे लोकप्रिय मशीन गन?
3. एक बुर्ज और उस पर बंदूक के साथ भारी लड़ाकू वाहन।
4. स्व-चालित पानी के नीचे की खदान।
6. बन्दूक का वह भाग जो चलाते समय कंधे पर टिका होता है।
8. रूसी सेना में सैन्य रैंक।
10. जर्मनी ने किस महीने में यूएसएसआर पर हमला किया?
12. कई बंदूकों से एक साथ फायरिंग.
14. इस शहर की नाकेबंदी 900 दिन की थी.
16. सैन्य आदेश का नाम.
18. कनिष्ठ नौसैनिक रैंकों में से एक।
20. एरोबेटिक्स, जब विमान की उड़ान के दौरान पंख झूलते हैं।
22. सैनिकों का प्रकार.
24. महान देशभक्तिपूर्ण युद्ध में विमान का प्रकार।
25. सैन्य इकाई.
26. एक सैनिक जो मिलिट्री स्कूल में पढ़ता है.
28. हमारी सेना में सैनिक का पद.
30. मुख्यालय के साथ संचार कौन प्रदान करता है?
32. सैन्य पद.
34. एक सैनिक उसे सौंपी गई वस्तु की रक्षा कहाँ करता है?
36. राइफल या मशीन गन के सिरे पर छुरा घोंपने वाला हथियार।
37. सेवा के पहले वर्षों में एक सैनिक हवा चलाना क्या सीखता है?
38. किसी बारूदी सुरंग या बम को निष्क्रिय करता है।
40. युद्धपोत : विध्वंसक.
42. बन्दूक में बैरल का व्यास.
44. जहाज के कमांडर से जहाज पर अधिकारी रैंक.
उत्तर:
क्षैतिज रूप से:
1 स्क्वाड्रन; 3-टैंकर; 5-लेविटन; 7-हमलावर; 9-कोर; 11-चीयर्स; 13 डगआउट; 15 मकरोव; 17-विजय; 19-लैंडिंग; 21 कील; 23-कोड; 25 हेलीकाप्टर; 26.-कत्यूषा; 27-ड्रिल; 29-एसौल; 31-बिंदु; 33-भर्ती; 35-परमाणु; 37-पैराशूट; 39-ग्रेनेड; 41-केर्जाची; 42-प्रतिआक्रामक; 43-रम्बस; 45 मई.
लंबवत:
2-कलाश्निकोव; 3-टैंक; 4-टारपीडो; 6-बट; 8-सार्जेंट; 10 जून; 12 साल्वो; 14 लेनिनग्राद; 16-रैंक; 18 नाविक; 20-घंटी; 22-तोपखाना; 24 बमवर्षक; 25वीं पलटन; 26-कैडेट; 28-रैंक; 30-सिग्नलमैन; 32-अधिकारी; 34-रक्षक; 36 संगीन; 37 फ़ुटक्लॉथ; 38-सैपर; 40 विध्वंसक; 42-कैलिबर; 44-कप्तान.
पेटेंट आरयू 2437984 के मालिक:
यह आविष्कार हाइड्रोलिक संरचनाओं के क्षेत्र से संबंधित है। वॉकिंग प्लेटफ़ॉर्म में एक कार्यशील और सहायक प्लेटफ़ॉर्म होते हैं, जो उनके आंदोलन और चल समर्थन के लिए तंत्र के माध्यम से एक दूसरे के सापेक्ष अनुवादात्मक और रोटरी आंदोलन की संभावना के साथ लगाए जाते हैं। सहायक मंच को कार्य मंच के नीचे रखा गया है। प्लेटफार्मों के बीच एक स्लाइडर लगाया गया है, जो ट्रांसलेशनल मूवमेंट मैकेनिज्म से सुसज्जित है। स्लाइडर एक कुंडा जोड़ के माध्यम से कार्यशील प्लेटफॉर्म से जुड़ा होता है और यांत्रिक रूप से हुक के माध्यम से सहायक प्लेटफॉर्म से जुड़ा होता है। वॉकिंग प्लेटफॉर्म का डिज़ाइन सरल बनाया गया है, गति की दिशा बदलने पर इसकी धातु की खपत और ऊर्जा की खपत कम हो जाती है। 1 जेड.पी. एफ-ली, 5 बीमार।
दावा किया गया आविष्कार हाइड्रोलिक संरचनाओं के क्षेत्र से संबंधित है, अर्थात् उथले महाद्वीपीय शेल्फ के विकास के लिए अपतटीय प्लेटफार्मों की संरचनाएं, और निर्माण के दौरान भारी संरचनाओं के परिवहन और स्थापना के लिए इसका उपयोग किया जा सकता है।
ज्ञात डिज़ाइन वॉकिंग प्लेटफ़ॉर्म, जिसमें प्लेटफ़ॉर्म के सापेक्ष ऊर्ध्वाधर दिशा में कई चल समर्थन के साथ एक चल प्लेटफ़ॉर्म शामिल है (1981 से यूएस पेटेंट नंबर 4288177 देखें)।
वॉकिंग प्लेटफ़ॉर्म के इस प्रसिद्ध डिज़ाइन का नुकसान चल समर्थन (8 समर्थन) की सीमित संख्या है, जिसके परिणामस्वरूप प्लेटफ़ॉर्म केवल घनी मिट्टी पर उपयोग के लिए उपयुक्त है। इसके अलावा, आयताकार सहायक उपकरणों वाले उपकरण अनुदैर्ध्य और अनुप्रस्थ दिशाओं में प्लेटफ़ॉर्म की समान गति और ऊर्ध्वाधर अक्ष के चारों ओर इसके घूमने की अनुमति नहीं देते हैं।
एक चलने वाले प्लेटफ़ॉर्म को जाना जाता है, जिसमें एक कामकाजी और सहायक प्लेटफ़ॉर्म होता है, जो उन्हें स्थानांतरित करने के लिए तंत्र और चल समर्थन के माध्यम से एक दूसरे के सापेक्ष अनुवादात्मक और रोटरी आंदोलन की संभावना के साथ घुड़सवार होता है (यूक्रेन संख्या 38578, आईपीसी 8 बी 60 पी का उपयोगिता मॉडल पेटेंट देखें) 2008 से 3/00 - प्रोटोटाइप)।
प्रोटोटाइप का नुकसान यह है कि कार्य मंच दो हिस्सों से बना है, ऊपरी और निचला, ऊंचाई में अलग-अलग दूरी पर। इस प्रकार, कार्य मंच के अंदर एक स्थान बनता है जिसमें सहायक मंच स्थित होता है।
यह पूरे प्लेटफ़ॉर्म के डिज़ाइन को जटिल बनाता है, क्योंकि क्षैतिज दिशा में सहायक प्लेटफ़ॉर्म के चल समर्थन की गति सुनिश्चित करने के लिए कार्यशील प्लेटफ़ॉर्म के निचले हिस्से (इसके सबसे लोडेड मध्य भाग पर) में उद्घाटन करना आवश्यक है।
इन उद्घाटनों के आयाम और विन्यास को यह सुनिश्चित करना चाहिए, जब प्लेटफ़ॉर्म घूम रहा हो (चल रहा हो), दोनों आयताकार (अनुदैर्ध्य और अनुप्रस्थ) दिशा में, और पूरे प्लेटफ़ॉर्म को मोड़ते समय, एक दूसरे के सापेक्ष कार्यशील और सहायक प्लेटफ़ॉर्म की पारस्परिक गति। इन उद्घाटनों की संख्या सहायक प्लेटफ़ॉर्म के चल समर्थनों की संख्या से निर्धारित होती है।
खुलेपन के कारण कार्य मंच का निचला हिस्सा सबसे अधिक भरी हुई जगह पर कमजोर हो जाता है।
कार्यशील प्लेटफॉर्म के निचले हिस्से के कमजोर होने की भरपाई के लिए, इसके क्रॉस सेक्शन के आकार को बढ़ाना आवश्यक होगा, जिससे पूरे प्लेटफॉर्म की ऊंचाई के आयाम में वृद्धि होगी और इसकी धातु की खपत में वृद्धि होगी।
इसके अलावा, प्रोटोटाइप डिज़ाइन का एक नुकसान यह है कि प्लेटफ़ॉर्म में प्रत्येक चरण पर उद्घाटन के आकार द्वारा सीमित रोटेशन कोण होता है, जिसके परिणामस्वरूप आंदोलन की दिशा बदलते समय प्लेटफ़ॉर्म के प्रक्षेपवक्र में पर्याप्त बड़ी त्रिज्या होगी। इसके कारण, आंदोलन की दिशा में बदलाव सुनिश्चित करने के लिए ऊर्जा की खपत बढ़ जाती है।
दावा किए गए आविष्कार का तकनीकी परिणाम चलने वाले प्लेटफॉर्म के डिजाइन को सरल बनाना है, जिससे आंदोलन की दिशा बदलते समय धातु की खपत और ऊर्जा की खपत कम हो जाती है।
निर्दिष्ट तकनीकी परिणाम एक चलने वाले प्लेटफ़ॉर्म में प्राप्त किया जाता है जिसमें एक कामकाजी और सहायक प्लेटफ़ॉर्म होते हैं, जो उनके आंदोलन और चल समर्थन के लिए तंत्र के माध्यम से एक दूसरे के सापेक्ष अनुवादात्मक और रोटरी आंदोलन की संभावना के साथ घुड़सवार होते हैं, जिसमें सहायक प्लेटफ़ॉर्म को नीचे रखा जाता है वर्किंग प्लेटफॉर्म, और उनके बीच एक स्लाइडर लगा होता है, जो ट्रांसलेशनल मूवमेंट मैकेनिज्म से सुसज्जित होता है, जिसमें स्लाइडर एक कुंडा जोड़ के माध्यम से वर्किंग प्लेटफॉर्म से जुड़ा होता है और यांत्रिक रूप से हुक के माध्यम से सहायक प्लेटफॉर्म से जुड़ा होता है।
निर्दिष्ट तकनीकी परिणाम वॉकिंग प्लेटफ़ॉर्म में भी प्राप्त किया जाता है, जिसमें कार्यशील प्लेटफ़ॉर्म के साथ स्लाइडर का कुंडा कनेक्शन एक स्लीविंग बियरिंग के रूप में बनाया जाता है और एक कुंडा आंदोलन तंत्र से सुसज्जित होता है।
चित्र 1 आविष्कारशील पैदल मंच, पार्श्व दृश्य को दर्शाता है;
चित्र 2 - वही, सामने का दृश्य;
चित्र 3 - खंड ए-ए, चित्र 1;
चित्र 4 - खंड बी-बी, चित्र 3;
चित्र 5 - नोड बी, चित्र 4।
आविष्कारशील वॉकिंग प्लेटफ़ॉर्म में चल समर्थन 2 के साथ एक कार्यशील प्लेटफ़ॉर्म 1 और चल समर्थन 4 के साथ एक सहायक प्लेटफ़ॉर्म 3 शामिल है। हाइड्रोलिक सिलेंडर के रूप में 7. ब्रैकेट 8 स्लाइडर 5 पर स्थापित हैं, और ब्रैकेट 9 सहायक प्लेटफ़ॉर्म 3 पर स्थापित हैं। स्लाइडर 5 एक कुंडा जोड़ 10 के माध्यम से कार्यशील प्लेटफ़ॉर्म 1 से जुड़ा हुआ है, जो एक स्लीविंग बियरिंग के रूप में बनाया गया है, उदाहरण के लिए, एक रोलर बियरिंग 11 जिसमें ऊपरी हिस्से द्वारा एक दूसरे के सापेक्ष घुमाव की संभावना होती है। रिंग 12 और निचला रिंग 13 दांत 14 और स्टड 15 और 16 के साथ। ऊपरी रिंग 12 स्टड 15 (कठोरता से) के साथ कार्यशील प्लेटफॉर्म 1 से जुड़ा हुआ है, निचला रिंग 13 स्टड 16 (कठोरता से) के साथ स्लाइडर 5 से जुड़ा हुआ है। रोटेशन मैकेनिज्म 17 को वर्किंग प्लेटफॉर्म 1 पर स्थापित किया गया है, और इसका गियर 18 दांत 14 के माध्यम से रोलर बेयरिंग 11 के निचले रिंग 13 के साथ इंटरेक्शन में प्रवेश करता है। इस मामले में, स्लाइडर 5 हुक 19 से सुसज्जित है जो कॉलर के साथ इंटरैक्ट करता है। 20 को सहायक प्लेटफॉर्म 3 पर स्थापित किया गया है।
प्रस्तावित पैदल मंच की गति एवं उसकी गति की दिशा में परिवर्तन इस प्रकार है।
वर्किंग प्लेटफॉर्म 1 के मूवेबल सपोर्ट 2 को तब तक जमीन पर उतारा जाता है जब तक कि हुक 19 कंधों 20 के साथ इंटरैक्ट नहीं कर लेते, और सहायक प्लेटफॉर्म 3, मूवेबल सपोर्ट 4 के साथ ऊपर उठ जाता है, और इसके मूवेबल सपोर्ट 4 जमीन से ऊपर नहीं आ जाते। इस स्थिति में, स्लाइडर 5 और सहायक प्लेटफ़ॉर्म 3 के बीच एक अंतर बन जाता है।
यदि चलने वाले प्लेटफ़ॉर्म को अनुदैर्ध्य दिशा में स्थानांतरित करने की आवश्यकता है, तो सहायक प्लेटफ़ॉर्म 3 को हाइड्रोलिक सिलेंडर 7 का उपयोग करके चल समर्थन 4 के साथ ले जाया जाता है, जो स्लाइडर 5 पर ब्रैकेट 8 के खिलाफ आराम करते हुए, इसे चल समर्थन 4 के साथ धक्का देता है। आवश्यक दूरी तक कोष्ठक 9 उस पर लगाए गए। इस मामले में, सहायक प्लेटफ़ॉर्म 3, चल समर्थन 4 के साथ, हुक 19 के साथ कंधों 20 को खिसकाते हुए चलता है।
इस आंदोलन के दौरान, चूंकि स्लाइडर 5 पिन 15 और 16 के साथ रोलर सपोर्ट 11 के माध्यम से कार्यशील प्लेटफॉर्म 1 से जुड़ा है, सहायक प्लेटफॉर्म 3, चल समर्थन 4 के साथ, कार्यशील प्लेटफॉर्म 1 के सापेक्ष चलता है।
सहायक प्लेटफ़ॉर्म 3 को स्थानांतरित करने के बाद, इसके चल समर्थन 4 को जमीन से टकराने तक नीचे कर दिया जाता है और स्लाइडर 5 और सहायक प्लेटफ़ॉर्म 3 के बीच की निकासी हटा दी जाती है। समर्थन 4 पर सहायक प्लेटफ़ॉर्म 3 को और ऊपर उठाने के साथ, कार्यशील प्लेटफ़ॉर्म 1 स्लाइडर 5 के माध्यम से ऊपर उठता है और इसके चल समर्थन 2 जमीन से ऊपर आते हैं। यदि हाइड्रोलिक सिलेंडर 7 को इस स्थिति में परिचालन में लाया जाता है, तो सहायक प्लेटफॉर्म 3 के सापेक्ष कार्यशील प्लेटफॉर्म 1 की अनुदैर्ध्य गति सुनिश्चित होती है।
यदि, इस स्थिति में, रोटेशन तंत्र 17 को पहले संचालन में रखा जाता है और कार्यशील प्लेटफ़ॉर्म 1 को रोलर समर्थन 11 पर किसी भी आवश्यक कोण पर घुमाया जाता है, और फिर हाइड्रोलिक सिलेंडर 7 को संचालन में रखा जाता है, तो कोण के माध्यम से मुड़ते समय 90°, प्लेटफ़ॉर्म की अनुदैर्ध्य गति अनुप्रस्थ में बदल जाती है।
90° से कम कोण से मुड़ते समय, चलने वाले प्लेटफ़ॉर्म की अनुदैर्ध्य गति को घूर्णन के साथ गति में बदल दिया जाता है।
यह वॉकिंग प्लेटफॉर्म को हिलाने का चरण पूरा करता है।
चरण पूरा होने के बाद, इसे दोहराने के लिए, सहायक प्लेटफ़ॉर्म 3 के चल समर्थन 4 को तब तक नीचे उतारा जाता है जब तक कि वे जमीन पर न गिर जाएँ और सहायक प्लेटफ़ॉर्म 3 को उठाने का संचालन और ऊपर वर्णित संचालन दोहराया जाता है।
इस प्रकार, वॉकिंग प्लेटफॉर्म के प्रस्तावित डिजाइन में रोलर बेयरिंग 11 के रूप में एक कुंडा जोड़ के साथ एक स्लाइडर को इसके डिजाइन में शामिल करने के कारण, रोटेशन के किसी भी आवश्यक कोण के साथ इसके आंदोलन को बदलना संभव है।
इसके कारण, वॉकिंग प्लेटफॉर्म को हिलाने पर, गति की दिशा में बदलाव के साथ उसके आंदोलन के चरणों को पूरा करने में ऊर्जा की खपत कम हो जाती है।
इसके अलावा, वर्किंग प्लेटफॉर्म 1 के डिजाइन को सरल बनाया गया है, क्योंकि इसमें सहायक प्लेटफॉर्म 3 के मूवेबल सपोर्ट 4 के लिए खांचे और कटआउट शामिल नहीं हैं। इससे वॉकिंग प्लेटफॉर्म की धातु की खपत कम हो जाती है।
1. एक चलने वाला प्लेटफार्म जिसमें कामकाजी और सहायक प्लेटफार्म होते हैं, जो उनके आंदोलन और चलने योग्य समर्थन के लिए तंत्र के माध्यम से एक दूसरे के सापेक्ष ट्रांसलेशनल और रोटरी आंदोलन की संभावना के साथ घुड़सवार होते हैं, जिसमें विशेषता होती है कि सहायक प्लेटफार्म कामकाजी प्लेटफार्म के नीचे और बीच में स्थित होता है उनमें एक स्लाइडर लगा होता है, जो ट्रांसलेशनल मैकेनिज्म मूवमेंट से सुसज्जित होता है, जबकि स्लाइडर एक कुंडा जोड़ के माध्यम से कार्यशील प्लेटफॉर्म से जुड़ा होता है और यांत्रिक रूप से हुक के माध्यम से सहायक प्लेटफॉर्म से जुड़ा होता है।
2. दावे 1 के अनुसार वॉकिंग प्लेटफॉर्म की विशेषता यह है कि स्लाइडर का वर्किंग प्लेटफॉर्म के साथ रोटरी कनेक्शन एक स्लीविंग बियरिंग के रूप में बनाया गया है और एक रोटरी मूवमेंट मैकेनिज्म से सुसज्जित है।
समान पेटेंट:
आविष्कार एक अपतटीय तेल उत्पादन प्लेटफ़ॉर्म के डेक के परिवहन, स्थापना और निराकरण के लिए एक उपकरण और उक्त प्लेटफ़ॉर्म के डेक के परिवहन, स्थापना और निराकरण के तरीकों से संबंधित है।
सोवियत समाजवादी गणराज्य संघ लेखक के प्रमाण पत्र के लिए आविष्कार की तस्वीर (51) एम. केएल, वी 62057/02 आविष्कारों और खोजों पर यूएसएसआर के मंत्रिपरिषद की राज्य समिति (45) विवरण के प्रकाशन की तिथि 06.07 .77(72) लेखक. जॉर्जियाई एसएसआर (54) के विज्ञान अकादमी के मशीन यांत्रिकी संस्थान के बी.डी. पेट्रीशविली संस्थान के आविष्कार, किनारों पर स्थित वॉकिंग प्लेटफ़ॉर्म पतवार, एक झुकी हुई सतह के साथ चलने के लिए अनुकूलित नहीं हैं, क्योंकि उनके गुरुत्वाकर्षण का केंद्र की दिशा में मिश्रित होगा निचला भाग. आविष्कार का उद्देश्य ढलान के पार चलते समय शरीर की ऊर्ध्वाधर स्थिति को बनाए रखना है। यह इस तथ्य से हासिल किया गया है कि प्लेटफ़ॉर्म 15 समानांतर हिंग वाले लीवर के दो जोड़े के साथ सामने और पीछे से जुड़े अनुदैर्ध्य साइड प्लेटों से सुसज्जित है, जबकि बॉडी को साइड बोर्ड और लीवर के बीच, टिका के नीचे और बाद में चार शार्क की मदद से स्वतंत्र रूप से रखा जाता है, प्रत्येक लीवर के केंद्र में एक स्थित होता है, और एक ऊर्ध्वाधर सेंसर और इस सेंसर द्वारा नियंत्रित एक एक्चुएटर से सुसज्जित होता है, उदाहरण के लिए , कोर के सापेक्ष लीवर के कोणीय वितरण को बदलने के लिए एक हाइड्रोलिक सिलेंडर। 1 प्रस्तावित वॉकिंग प्लेटफॉर्म और क्षैतिज सतह पर उसकी गति, पार्श्व दृश्य को दर्शाता है; अंजीर में. 2 "वही, ढलान के पार चलते समय, सामने का दृश्य, चलने वाले प्लेटफ़ॉर्म में एक लोड-बेयरिंग होता है। ड्राई बॉडी 1 और स्टेपिंग: वाहन के दाएं और बाएं तरफ स्थित समर्थन तत्व 2। चलने वाले समर्थन तत्व लगे होते हैं साइड प्लेट 3, जो आगे और पीछे अनुप्रस्थ समानांतर लीवर 4 के दो जोड़े टिका 5 के साथ आपस में जुड़े हुए हैं, बॉडी 1 को बैकप्लेट 3 और लीवर 4 के बीच स्वतंत्र रूप से चिह्नित किया गया है और चार टिका 6 का उपयोग करके बाद वाले द्वारा निलंबित किया गया है, जिनमें से प्रत्येक स्थित है लीवर के बीच में 4. शरीर पर एक ऊर्ध्वाधर सेंसर स्थापित किया गया है, उदाहरण के लिए, स्पूल 8 के रूप में बनाया गया है, जो तेल वितरित कर सकता है, मैं आता हूं) पंप 9 और चैनल 30 और 11 से) हाइड्रोसिलेंडर पर जा रहा हूं 12, जिसका वर्तमान 13)) कुल्न्स राइटचैट 14 से जुड़ा है। ) 8 एन तेल पंप 0 को चैनल 10 के साथ संचार करता है, और रॉड 13, कूल लीवर 14 का उपयोग करके, सभी लीवर 4 को ऐसी स्थिति में बदल देता है जिसमें बॉडी सस्पेंशन के सहायक तत्व, टिका 5 और टिका 6 एक ही ऊर्ध्वाधर में जोड़े में स्थित हैं, इस प्रकार बॉडी 1 एक ऊर्ध्वाधर स्थिति में है। वर्तमान आविष्कार के उपयोग से स्लाइडिंग तंत्र की स्थिरता और पहाड़ों की बड़ी ढलानों पर उनकी पारगम्यता में सुधार करना संभव हो जाता है। ढलान के पार चलते समय शरीर की ऊर्ध्वाधर स्थिति बनाए रखने के लिए, यह अनुदैर्ध्य साइड प्लेटों से सुसज्जित है आगे और पीछे समानांतर हिंग वाले लीवर के दो जोड़े द्वारा जुड़े हुए हैं, शरीर को साइड प्लेटों और लीवर के बीच स्वतंत्र रूप से रखा गया है, लीवर के प्रत्येक 15 के केंद्र में एक समय में स्थित चार काज के माध्यम से बाद वाले द्वारा निलंबित किया गया है, और इस सेंसर द्वारा नियंत्रित एक ऊर्ध्वाधर सेंसर, कार्यकारी तंत्र से सुसज्जित है। नेट्रिट, शरीर के सापेक्ष लीवर की कोणीय स्थिति को बदलने के लिए एक हाइड्रोलिक सिलेंडर के साथ एलईआर। खाद्य व्लासेनक डी। लिटरएन, कोज़लोम एक्रेड ए। डेम्यानोवा द्वारा संकलित, सही ढंग से हस्ताक्षरित सीटीएनए पेटेंट, लिआल पी उज़गोरोड, सेंट, परिषद की समिति आविष्कारों के लिए खदानें और यूएसएसआर में रौशस्काया नाब, 4 / खोली गईं
आवेदन
1956277, 01.08.1973
जॉर्जियाई एसएसआर के मशीन यांत्रिकी संस्थान
पेट्रियाश्विली बिडज़िना डेविडोविच
आईपीसी / टैग
लिंक कोड
चलने का मंच
संबंधित पेटेंट
अमोनिया, अल्कोहल आदि के संश्लेषण के लिए स्तंभों के नोजल की स्थापना। स्तंभ तंत्र के आंतरिक उपकरण को उसके निचले हिस्से में स्थित आवास के समर्थन काठी पर स्थापित करने की एक विधि है। इस मामले में, सतहों के बीच उनके जोड़ को नियंत्रित करने की असंभवता के कारण अस्वीकार्य रिसाव बनते हैं। आविष्कार का उद्देश्य सहायक सतहों के जुड़ाव को नियंत्रित करना, स्थापना में आसानी और जुड़ने की स्थिति को समायोजित करने की संभावना का प्रावधान करना है। भागों। यह इस तथ्य से प्राप्त होता है कि आंतरिक उपकरण को पहले आवास के अंदर सहायक मध्यवर्ती सतह पर स्थापित किया जाता है ताकि इसका असर वाला पैर निचले कट से आगे निकल जाए, और शरीर के असर वाले काठी को नीचे से ऊपर लाया जाए, जोड़ा जाए आंतरिक उपकरण के असर वाले पैर के साथ, जोड़ को नियंत्रित करते हुए,...
वाहन 1 के शरीर की स्थिति और सड़क की सतह के संबंध में 4. चलती फ्रेम के लोचदार तत्वों के माध्यम से गतिशीलता का स्थिरीकरण, शरीर की ऊंचाई और संचालित विधि को समायोजित करके इसे विश्वसनीय रूप से कम किया जाता है जब या सड़क के दर्जी को बदलने के लोचदार कार्य को संपीड़ित करना, वाहन के निलंबन निकाय पर कार्य करने वाले बलों के ज्ञात तरीकों के सापेक्ष साधनों में लोचदार परिवर्तन को मजबूर करना। आविष्कार का उद्देश्य सह-ऊर्जा लागत को कम करना है हमारा शरीर।
पतवार की सहायक संरचना की योजना और खंड ए - ए में सामान्य दृश्य; चित्र 2 में - सहायक भाग के चयन के साथ क्रॉस सेक्शन और सपोर्ट पसलियाँ; अंजीर में. 3 - विनिर्माण प्रक्रिया में सहायक भाग का मुखौटा और अनुभाग बी - बी; अंजीर में. 4 - स्क्रू लेवलिंग की योजना। सहायक भाग और अनुभाग बी - बी को माउंट करने की प्रक्रिया में उपकरण: अलग-अलग निर्मित रेडियल पसलियों और सहायक भागों 2 के साथ उच्च दबाव वाले पोत की "समर्थन संरचना" में कामकाजी सतह 3 बनाने वाली चादरें शामिल हैं, इसके अलावा, सहायक भाग अखंड हैं पसलियों के साथ इस तरह से कि सभी कामकाजी सतहें एक ही विमान में स्थित हों। उच्च दबाव वाले पोत की सहायक संरचना के सहायक हिस्सों को एक उलटी स्थिति में किनारे पर बनाया जाता है, और कामकाजी सतह की शीट 3 एंकर के साथ होती है। ..

पेटेंट संख्या: 902115
पूर्व और पश्चिम के बीच का "आयरन पर्दा" ढह गया, लेकिन परिणामस्वरूप, सैन्य प्रौद्योगिकी के विकास की गति न केवल बदली, बल्कि तेज भी हो गई। कल के हथियार क्या होंगे? पाठक को इस प्रश्न का उत्तर प्रस्तावित पुस्तक में मिलेगा, जिसमें प्रायोगिक सैन्य उपकरणों के सबसे दिलचस्प नमूनों और अगली शताब्दी में लागू की जाने वाली परियोजनाओं के बारे में जानकारी शामिल है। रूसी पाठक पहली बार कई तथ्यों से परिचित हो सकेंगे!
कलाकार
कलाकार
भविष्य की पुस्तकों में से एक में निकट भविष्य के युद्धक्षेत्र का वर्णन इस प्रकार किया गया है: “... संचार उपग्रहों से रेडियो संकेतों ने कमांडर को आसन्न दुश्मन के आक्रमण के बारे में चेतावनी दी। कई मीटर की गहराई पर स्थापित भूकंपीय सेंसरों के एक नेटवर्क ने इसकी पुष्टि की। मिट्टी के कंपन को दर्ज करके, सेंसर कोडित संकेतों के साथ मुख्यालय के कंप्यूटर को जानकारी भेजते हैं। उत्तरार्द्ध अब काफी सटीक रूप से जानता है कि दुश्मन के टैंक और तोपखाने कहाँ स्थित हैं। सेंसर अलग-अलग द्रव्यमान की सैन्य वस्तुओं से प्राप्त ध्वनिक संकेतों को तुरंत फ़िल्टर करते हैं, और वे कंपन स्पेक्ट्रम द्वारा बख्तरबंद कर्मियों के वाहक से तोपखाने के टुकड़ों को अलग करते हैं। दुश्मन के स्वभाव को स्थापित करने के बाद, मुख्यालय का कंप्यूटर पार्श्व पलटवार करने का निर्णय लेता है ... हमलावरों के आगे, मैदान पर खनन किया जाता है, और केवल एक संकीर्ण गलियारा होता है। हालाँकि, कंप्यूटर अधिक चालाक निकला: यह एक सेकंड के निकटतम हज़ारवें हिस्से में यह निर्धारित करता है कि कौन सी खदान में विस्फोट होना चाहिए। लेकिन यह पर्याप्त नहीं है: लघु कूदने वाली खदानों ने दुश्मन के पीछे पीछे हटने को बंद कर दिया। बाहर कूदने के बाद, ये खदानें ज़िगज़ैग पैटर्न में चलना शुरू कर देती हैं, विस्फोट केवल तभी होता है जब उन्हें पता चलता है - धातु के द्रव्यमान से - कि उन्होंने एक टैंक या तोपखाने के टुकड़े को मारा है। इसके साथ ही, छोटे कामिकेज़ विमानों का एक झुंड लक्ष्य पर दुर्घटनाग्रस्त हो जाता है। हमला करने से पहले, वे युद्ध के मैदान पर मामलों की स्थिति के बारे में मुख्यालय के कंप्यूटर पर एक नई जानकारी भेजते हैं ... जो लोग इस नरक में जीवित रहने का प्रबंधन करते हैं उन्हें रोबोट सैनिकों से निपटना होगा। उनमें से प्रत्येक, "महसूस", उदाहरण के लिए, एक टैंक का दृष्टिकोण, एक मशरूम की तरह बढ़ने लगता है, और अपनी "आंखें" खोलता है, इसे खोजने की कोशिश करता है। यदि लक्ष्य एक सौ मीटर के दायरे में दिखाई नहीं देता है, तो रोबोट उसकी ओर बढ़ता है और उन छोटी मिसाइलों में से एक से हमला करता है जिनसे वह लैस है..."।
विशेषज्ञ सैन्य रोबोटिक्स का भविष्य मुख्य रूप से स्वायत्त रूप से कार्य करने में सक्षम लड़ाकू वाहनों के निर्माण के साथ-साथ स्वतंत्र रूप से "सोचने" में देखते हैं।
इस क्षेत्र की पहली परियोजनाओं में एक सेना स्वायत्त वाहन (एएटीएस) बनाने का कार्यक्रम है। नया लड़ाकू वाहन विज्ञान कथा फिल्मों के मॉडल जैसा दिखता है: आठ छोटे पहिये, बिना किसी स्लॉट और पोरथोल के एक उच्च बख्तरबंद शरीर, धातु में छिपा हुआ एक छिपा हुआ टेलीविजन कैमरा। यह वास्तविक कंप्यूटर प्रयोगशाला जमीनी लड़ाकू हथियारों के स्वायत्त कंप्यूटर नियंत्रण के तरीकों का परीक्षण करने के लिए बनाई गई थी। नवीनतम एएटीएस मॉडल पहले से ही कई टेलीविजन कैमरे, एक अल्ट्रासोनिक लोकेटर और ओरिएंटेशन के लिए मल्टी-वेवलेंथ लेजर का उपयोग करते हैं, जिससे एकत्र किया गया डेटा न केवल पाठ्यक्रम में, बल्कि रोबोट के आसपास भी कुछ स्पष्ट "चित्र" में एकत्र किया जाता है। डिवाइस को अभी भी छाया और वास्तविक बाधाओं के बीच अंतर करना सिखाया जाना चाहिए, क्योंकि कंप्यूटर-नियंत्रित टेलीविजन कैमरे के लिए, एक पेड़ की छाया एक गिरे हुए पेड़ के समान होती है।
एएटीएस के निर्माण के लिए परियोजना में भाग लेने वाली कंपनियों के दृष्टिकोण और उनके सामने आने वाली कठिनाइयों पर विचार करना दिलचस्प है। आठ पहियों वाले एएटीएस का आंदोलन नियंत्रण, जिसकी ऊपर चर्चा की गई थी, ऑन-बोर्ड कंप्यूटर का उपयोग करके किया जाता है जो दृश्य धारणा के विभिन्न माध्यमों से संकेतों को संसाधित करता है और स्थलाकृतिक मानचित्र का उपयोग करता है, साथ ही आंदोलन रणनीति पर डेटा के साथ एक ज्ञान आधार भी रखता है। वर्तमान स्थिति के संबंध में निष्कर्ष निकालने के लिए एल्गोरिदम। कंप्यूटर ब्रेकिंग दूरी की लंबाई, मोड़ने की गति और अन्य आवश्यक गति पैरामीटर निर्धारित करते हैं।
पहले प्रदर्शन परीक्षणों के दौरान, एएटीएस को एक एकल टेलीविज़न कैमरे का उपयोग करके 3 किमी/घंटा की गति से एक चिकनी सड़क पर चलाया गया था, जो वॉल्यूमेट्रिक सूचना निष्कर्षण के लिए मैरीलैंड विश्वविद्यालय में विकसित तरीकों का उपयोग करके सड़क के कंधों को पहचानता था। तत्कालीन उपयोग किए गए कंप्यूटरों की कम गति के कारण, AATS को हर 6 मीटर पर स्टॉप बनाने के लिए मजबूर होना पड़ता था। 20 किमी / घंटा की गति से निरंतर गति सुनिश्चित करने के लिए, कंप्यूटर के प्रदर्शन को 100 गुना बढ़ाना होगा।
विशेषज्ञों के अनुसार, कंप्यूटर इन विकासों में महत्वपूर्ण भूमिका निभाता है और मुख्य कठिनाइयाँ कंप्यूटर से जुड़ी हैं। इसलिए, यूपीपीएनआईआर के आदेश से, कार्नेगी मेलन विश्वविद्यालय ने विशेष रूप से एएटीएस के लिए एक उच्च-प्रदर्शन वाला WARP कंप्यूटर विकसित करने की योजना बनाई। विश्वविद्यालय से सटे सड़कों पर 55 किमी/घंटा तक की गति से आवाजाही के लिए इसके स्वायत्त नियंत्रण के लिए विशेष रूप से निर्मित कार पर एक नया कंप्यूटर स्थापित करने की योजना बनाई गई है। डेवलपर्स इस सवाल का जवाब देते समय सतर्क रहते हैं कि क्या कंप्यूटर पूरी तरह से ड्राइवर की जगह ले सकता है, उदाहरण के लिए, युवा और बूढ़े पैदल यात्रियों द्वारा सड़क पार करने की गति की गणना करते समय, लेकिन उन्हें विश्वास है कि यह सबसे कम समय चुनने जैसे कार्यों में बेहतर होगा। मानचित्र पर पथ.
यूपीपीएनआईआर ने जनरल इलेक्ट्रिक से एक सॉफ्टवेयर पैकेज का ऑर्डर दिया जो एएटीएस को चलते समय इलाके के विवरण, कारों, लड़ाकू वाहनों आदि को पहचानने की अनुमति देगा। कंप्यूटर मेमोरी में संग्रहीत। चूंकि प्रत्येक पहचानने योग्य वस्तु (टैंक, बंदूक, आदि) की छवि के कंप्यूटर निर्माण के लिए बहुत अधिक श्रम की आवश्यकता होती है, इसलिए कंपनी ने विभिन्न दृश्यों में तस्वीरों, रेखाचित्रों या लेआउट से वस्तुओं की शूटिंग का रास्ता अपनाया, उदाहरण के लिए, सामने से और पक्ष, और छवियों को डिजिटाइज़ किया जाता है, पता लगाया जाता है और वेक्टर रूप में परिवर्तित किया जाता है। फिर, विशेष एल्गोरिदम और सॉफ्टवेयर पैकेज का उपयोग करके, परिणामी छवियों को ऑब्जेक्ट के त्रि-आयामी समोच्च प्रतिनिधित्व में परिवर्तित किया जाता है, जिसे कंप्यूटर की मेमोरी में दर्ज किया जाता है। जब एटीएस चलती है, तो इसका ऑन-बोर्ड टेलीविज़न कैमरा रास्ते में आने वाली किसी वस्तु को शूट करता है, जिसकी छवि प्रसंस्करण के दौरान विपरीत दिशा में तेज बदलाव वाले स्थानों में रेखाओं और अभिसरण बिंदुओं के रूप में प्रस्तुत की जाती है। फिर, पहचान के दौरान, इन चित्रों की तुलना कंप्यूटर की मेमोरी में दर्ज वस्तुओं के अनुमानों से की जाती है। मान्यता प्रक्रिया को वस्तु की तीन या चार ज्यामितीय विशेषताओं के काफी सटीक मिलान के साथ सफलतापूर्वक पूरा किया गया माना जाता है, और कंप्यूटर पहचान की सटीकता में सुधार करने के लिए और अधिक विस्तृत विश्लेषण करता है।
उबड़-खाबड़ इलाकों पर बाद के और अधिक जटिल परीक्षण स्टीरियोस्कोपिक धारणा प्रदान करने के लिए एएटीएस में कई टेलीविजन कैमरों की शुरूआत के साथ-साथ पांच-बैंड लेजर लोकेटर से जुड़े थे, जिससे आंदोलन के रास्ते में बाधाओं की प्रकृति का आकलन करना संभव हो गया। जिसके लिए लेजर विकिरण के अवशोषण और प्रतिबिंब गुणांक को विद्युत चुम्बकीय स्पेक्ट्रम के पांच खंडों में मापा गया था।
यूपीपीआईआर ने क्रॉस-कंट्री यात्रा के लिए पहियों के बजाय छह पैरों वाले एएटीएस के ओहियो विश्वविद्यालय के विकास को भी वित्त पोषित किया। इस मशीन की ऊंचाई 2.1 मीटर, लंबाई 4.2 मीटर और वजन लगभग 2300 किलोग्राम है। विभिन्न प्रयोजनों के लिए समान स्व-चालित रोबोट वर्तमान में 40 औद्योगिक फर्मों द्वारा सक्रिय रूप से विकसित किए जा रहे हैं।
एक मानवरहित लड़ाकू वाहन की अवधारणा, जिसका मुख्य कार्य महत्वपूर्ण वस्तुओं की सुरक्षा और गश्त करना है, अमेरिकी प्रॉलर लड़ाकू रोबोट में सबसे स्पष्ट रूप से सन्निहित है। इसका संयुक्त नियंत्रण है, इसे छह पहियों वाले ऑल-टेरेन वाहन के चेसिस पर बनाया गया है, यह एक लेजर रेंजफाइंडर, नाइट विजन डिवाइस, एक डॉपलर रडार, तीन टेलीविजन कैमरे से सुसज्जित है, जिनमें से एक ऊंचाई तक बढ़ सकता है। टेलीस्कोपिक मस्तूल के साथ-साथ अन्य सेंसर का उपयोग करके 8.5 मीटर, जो संरक्षित क्षेत्र के किसी भी उल्लंघनकर्ता का एक साथ पता लगाने और पहचानने की अनुमति देता है। जानकारी को ऑन-बोर्ड कंप्यूटर की सहायता से संसाधित किया जाता है, जिसकी मेमोरी में बंद मार्ग पर रोबोट के स्वायत्त आंदोलन के कार्यक्रम संग्रहीत होते हैं। ऑफ़लाइन मोड में, घुसपैठिए को नष्ट करने का निर्णय कंप्यूटर की मदद से किया जाता है, और टेलीकंट्रोल मोड में - ऑपरेटर द्वारा। बाद के मामले में, ऑपरेटर तीन कैमरों से एक टीवी चैनल के माध्यम से जानकारी प्राप्त करता है, और नियंत्रण आदेश रेडियो द्वारा प्रसारित होते हैं। यह ध्यान दिया जाना चाहिए कि रोबोट के टेलीकंट्रोल सिस्टम में, मोड में नियंत्रण का उपयोग केवल उसके सिस्टम का निदान करते समय किया जाता है, जिसके लिए ऑपरेटर के पास एक विशेष मॉनिटर स्थापित होता है। प्रॉलर एक ग्रेनेड लॉन्चर और दो मशीन गन से लैस है।
एक अन्य सैन्य रोबोट, जिसे ओडेक्स कहा जाता है, तोपखाने के गोले और अन्य गोला-बारूद को लोड और अनलोड कर सकता है, एक टन से अधिक वजन का भार ले जा सकता है और सुरक्षा लाइनों को बायपास कर सकता है। जैसा कि रैंड कॉरपोरेशन की विश्लेषणात्मक रिपोर्ट में बताया गया है, प्रारंभिक गणना के अनुसार, ऐसे प्रत्येक रोबोट की लागत 250 हजार डॉलर अनुमानित है (तुलना के लिए, अमेरिकी जमीनी बलों के मुख्य टैंक "अब्राम्स" एमएल की कीमत पेंटागन 2.8 मिलियन डॉलर है) ).

ओडेक्स छह पैरों वाला एक चलने वाला मंच है, प्रत्येक तीन इलेक्ट्रिक मोटर द्वारा संचालित होता है, और छह माइक्रोप्रोसेसरों (प्रत्येक पैर के लिए एक) और उन्हें समन्वयित करने वाले एक केंद्रीय प्रोसेसर द्वारा नियंत्रित किया जाता है। आंदोलन की प्रक्रिया में, रोबोट की चौड़ाई 540 से 690 मिमी और ऊंचाई - 910 से 1980 मिमी तक भिन्न हो सकती है। रिमोट कंट्रोल रेडियो चैनल द्वारा किया जाता है। ऐसी भी खबरें हैं कि इस प्लेटफॉर्म के आधार पर रोबोट का एक संस्करण बनाया गया है, जो जमीन और हवा दोनों में काम करता है। पहले मामले में, रोबोट सभी समान समर्थनों की मदद से चलता है, और दूसरे मामले में, विशेष ब्लेड हेलीकॉप्टर की तरह गति प्रदान करते हैं।
अमेरिकी नौसेना के लिए भारी भार के लिए NT-3 रोबोट और ROBART-1 पहले ही बनाए जा चुके हैं, जो आग, जहरीले पदार्थों और अग्रिम पंक्ति में प्रवेश करने वाले दुश्मन के उपकरणों को ठीक करता है, और इसमें 400 शब्दों का शब्दकोश है। इसके अलावा, ROBART-1 बैटरियों को रिचार्ज करने के लिए स्वयं गैस स्टेशन तक पहुंचने में सक्षम है। प्रसिद्ध टाइटैनिक की मृत्यु स्थल पर व्यापक रूप से विज्ञापित अभियान, जो 1986 में किया गया था, का एक छिपा हुआ मुख्य लक्ष्य था - नए सैन्य अंडरवाटर रोबोट जेसन जूनियर का परीक्षण करना।
80 के दशक में, विशेष मानवरहित लड़ाकू वाहन दिखाई दिए, जो केवल टोही मिशन करते थे। इनमें टोही लड़ाकू रोबोट टीएमएआर (यूएसए), टीम स्काउट (यूएसए), एआरवीटीबी (यूएसए), एएलवी (यूएसए), रोवा (यूके) और अन्य शामिल हैं। चार पहियों वाला छोटे आकार का मानवरहित रिमोट-नियंत्रित वाहन टीएमएआर, जिसका वजन 270 किलोग्राम है, टेलीविजन कैमरा, नाइट विजन डिवाइस और ध्वनिक सेंसर की मदद से दिन के किसी भी समय टोह लेने में सक्षम है। यह लेज़र पॉइंटर से भी सुसज्जित है।
"टीम स्काउट" एक पहिएदार वाहन है जिसमें थर्मल टेलीविजन कैमरे, विभिन्न सेंसर और गति नियंत्रण मैनिपुलेटर हैं। इसमें संयुक्त नियंत्रण किया जाता है: टेलीकंट्रोल मोड में, कमांड ट्रैक्टर-ट्रेलर पर स्थित नियंत्रण मशीन से आते हैं, ऑफ़लाइन मोड में - क्षेत्र के डिजिटल मानचित्र का उपयोग करके तीन ऑन-बोर्ड कंप्यूटर से।
ट्रैक किए गए बख्तरबंद कार्मिक वाहक M113A2 के आधार पर, एक मानव रहित लड़ाकू टोही वाहन ARVTB बनाया गया, जिसमें अपने कार्यों को करने के लिए एक नेविगेशन प्रणाली और तकनीकी निगरानी उपकरण हैं। "टीम स्काउट" की तरह, इसमें ऑपरेशन के दो तरीके हैं - रेडियो और स्वायत्त द्वारा कमांड के प्रसारण के साथ रिमोट कंट्रोल।
उपरोक्त सभी टोही रोबोटों में दो प्रकार के तकनीकी नियंत्रणों का उपयोग किया जाता है। रिमोट कंट्रोल मोड में, पर्यवेक्षी टेलीकंट्रोल का उपयोग किया जाता है (वॉइस कमांड सहित सामान्यीकृत ऑपरेटर कमांड के अनुसार), और ऑफ़लाइन मोड में, बाहरी वातावरण में परिवर्तनों के अनुकूल रोबोट की सीमित क्षमता के साथ अनुकूली नियंत्रण का उपयोग किया जाता है।
एएलवी टोही वाहन अन्य विकासों की तुलना में अधिक उन्नत है। पहले चरण में, इसमें अनुकूलन के तत्वों के साथ कार्यक्रम नियंत्रण प्रणालियाँ भी थीं, लेकिन बाद में कृत्रिम बुद्धिमत्ता के अधिक से अधिक तत्वों को नियंत्रण प्रणालियों में पेश किया गया, जिससे लड़ाकू अभियानों को हल करने में स्वायत्तता बढ़ गई। सबसे पहले, "बौद्धिकीकरण" ने नेविगेशन प्रणाली को प्रभावित किया। 1985 में, नेविगेशन सिस्टम ने ALV कार को स्वतंत्र रूप से 1 किमी की दूरी तय करने की अनुमति दी। सच है, तब क्षेत्र को देखने के लिए टेलीविजन कैमरे से जानकारी का उपयोग करके डिवाइस को सड़क के बीच में स्वचालित रूप से रखने के सिद्धांत के अनुसार आंदोलन किया गया था।
नेविगेशन जानकारी प्राप्त करने के लिए, एक रंगीन टेलीविज़न कैमरा, ध्वनिक सेंसर जो आस-पास की वस्तुओं का इकोलोकेशन उत्पन्न करते हैं, साथ ही बाधाओं की दूरी की सटीक माप और उनकी स्थानिक स्थिति प्रदर्शित करने वाला एक लेजर स्कैनिंग लोकेटर ALV कार में स्थापित किया गया है। अमेरिकी विशेषज्ञ यह सुनिश्चित करने की उम्मीद करते हैं कि एएलवी मशीन स्वतंत्र रूप से उबड़-खाबड़ इलाकों में आवाजाही का एक तर्कसंगत मार्ग चुनने, बाधाओं को दूर करने और, यदि आवश्यक हो, तो आंदोलन की दिशा और गति को बदलने में सक्षम हो। यह पूरी तरह से स्वायत्त चालक दल रहित लड़ाकू वाहन के निर्माण का आधार बनना चाहिए जो न केवल टोही करने में सक्षम है, बल्कि विभिन्न हथियारों से दुश्मन के सैन्य उपकरणों को नष्ट करने सहित अन्य कार्रवाई भी कर सकता है।
आधुनिक लड़ाकू रोबोट - हथियारों के वाहक में दो अमेरिकी विकास शामिल हैं: "रोबोटिक रेंजर" और "दानव"।
रोबोटिक रेंजर एक चार पहिया इलेक्ट्रिक वाहन है जो दो एटीजीएम लॉन्चर या एक मशीन गन ले जा सकता है। इसका द्रव्यमान 158 किलोग्राम है। टेलीकंट्रोल एक फाइबर-ऑप्टिक केबल के माध्यम से किया जाता है, जो उच्च शोर प्रतिरक्षा प्रदान करता है और एक ही क्षेत्र में एक साथ बड़ी संख्या में रोबोट को नियंत्रित करना संभव बनाता है। फाइबरग्लास केबल की लंबाई ऑपरेटर को 10 किमी तक की दूरी पर रोबोट को संचालित करने की अनुमति देती है।
एक और "रेंजर" डिज़ाइन चरण में है, जो अपने स्वयं के प्रक्षेपवक्र को "देखने" और याद रखने में सक्षम है और बाधाओं से बचते हुए अपरिचित उबड़-खाबड़ इलाके से गुजरता है। परीक्षण नमूना सेंसर की एक पूरी श्रृंखला से सुसज्जित है, जिसमें टेलीविजन कैमरे, एक लेजर लोकेटर जो इलाके की त्रि-आयामी छवि को कंप्यूटर तक पहुंचाता है, और एक इन्फ्रारेड विकिरण रिसीवर जो आपको रात में स्थानांतरित करने की अनुमति देता है। चूंकि सेंसर से प्राप्त छवियों के विश्लेषण के लिए बड़ी गणना की आवश्यकता होती है, रोबोट, दूसरों की तरह, केवल कम गति से चलने में सक्षम है। सच है, जैसे ही पर्याप्त गति वाले कंप्यूटर सामने आएंगे, उन्हें इसकी गति 65 किमी/घंटा तक बढ़ाने की उम्मीद है। आगे के सुधार के साथ, रोबोट दुश्मन की स्थिति पर लगातार नजर रखने या सबसे सटीक लेजर-निर्देशित बंदूकों से लैस एक स्वचालित टैंक के रूप में युद्ध में शामिल होने में सक्षम होगा।
70 के दशक के अंत और 80 के दशक की शुरुआत में संयुक्त राज्य अमेरिका में बनाया गया लगभग 2.7 टन वजन वाला छोटे आकार का हथियार वाहक "दानव" संयुक्त मानव रहित पहिएदार लड़ाकू वाहनों से संबंधित है। यह थर्मल होमिंग हेड्स, एक लक्ष्य का पता लगाने वाले रडार, एक दोस्त या दुश्मन की पहचान प्रणाली और नेविगेशन समस्याओं को हल करने और लड़ाकू संपत्तियों को नियंत्रित करने के लिए एक ऑन-बोर्ड कंप्यूटर के साथ एटीजीएम (आठ से दस इकाइयां) से लैस है। फायरिंग लाइनों की ओर और लक्ष्य की लंबी दूरी पर आगे बढ़ते समय, दानव रिमोट कंट्रोल मोड में काम करता है, और जब 1 किमी से कम दूरी पर लक्ष्य के करीब पहुंचता है, तो यह स्वचालित मोड में स्विच हो जाता है। उसके बाद, ऑपरेटर की भागीदारी के बिना लक्ष्य का पता लगाया जाता है और उस पर प्रहार किया जाता है। दानव वाहनों के रिमोट कंट्रोल मोड की अवधारणा को द्वितीय विश्व युद्ध के अंत में ऊपर उल्लिखित जर्मन बी-4 टैंकेट से कॉपी किया गया था: एक या दो दानव वाहनों का नियंत्रण एक विशेष रूप से सुसज्जित टैंक के चालक दल द्वारा किया जाता है . अमेरिकी विशेषज्ञों द्वारा किए गए युद्ध अभियानों के गणितीय मॉडलिंग से पता चला है कि दानव वाहनों के साथ टैंकों की संयुक्त कार्रवाई से टैंक इकाइयों की मारक क्षमता और उत्तरजीविता में वृद्धि होती है, खासकर रक्षात्मक लड़ाइयों में।
दूर से नियंत्रित और चालक दल वाले लड़ाकू वाहनों के एकीकृत उपयोग की अवधारणा को आरसीवी ("रोबोटिक कॉम्बैट व्हीकल") कार्यक्रम पर काम में आगे विकसित किया गया था। यह एक नियंत्रण वाहन और चार रोबोटिक लड़ाकू वाहनों से युक्त एक प्रणाली के विकास का प्रावधान करता है जो एटीजीएम का उपयोग करके वस्तुओं को नष्ट करने सहित विभिन्न कार्य करता है।
इसके साथ ही हल्के मोबाइल हथियार ले जाने वाले रोबोटों के साथ, विदेशों में अधिक शक्तिशाली लड़ाकू हथियार बनाए जा रहे हैं, विशेष रूप से एक रोबोटिक टैंक। संयुक्त राज्य अमेरिका में, यह काम 1984 से किया जा रहा है, और जानकारी प्राप्त करने और संसाधित करने के लिए सभी उपकरण एक ब्लॉक संस्करण में बनाए गए हैं, जो एक साधारण टैंक को रोबोट टैंक में बदलने की अनुमति देता है।
घरेलू प्रेस ने बताया कि रूस में भी इसी तरह का काम किया जा रहा है। विशेष रूप से, सिस्टम पहले ही बनाए जा चुके हैं, जो टी-72 टैंक पर स्थापित होने पर, इसे पूरी तरह से स्वायत्त मोड में संचालित करने की अनुमति देते हैं। इस उपकरण का अभी परीक्षण किया जा रहा है।

हाल के दशकों में मानव रहित लड़ाकू वाहनों के निर्माण पर सक्रिय कार्य ने पश्चिमी विशेषज्ञों को इस निष्कर्ष पर पहुंचाया है कि उनके घटकों और प्रणालियों को मानकीकृत और एकीकृत करना आवश्यक है। यह चेसिस और गति नियंत्रण प्रणालियों के लिए विशेष रूप से सच है। चालक दल रहित लड़ाकू वाहनों के परीक्षण किए गए संस्करणों का अब स्पष्ट रूप से परिभाषित उद्देश्य नहीं है, बल्कि बहुउद्देश्यीय प्लेटफार्मों के रूप में उपयोग किया जाता है, जिस पर टोही उपकरण, विभिन्न हथियार और उपकरण स्थापित किए जा सकते हैं। इनमें पहले से उल्लिखित रोबोटिक रेंजर, एआईवी और आरसीवी वाहन, साथ ही आरआरवी-1ए वाहन और ओडेक्स रोबोट शामिल हैं।
तो क्या युद्ध के मैदान में सैनिकों की जगह रोबोट लेंगे? क्या कृत्रिम बुद्धिमत्ता वाली मशीनें इंसानों की जगह ले लेंगी? कंप्यूटर द्वारा उन कार्यों को करने से पहले बड़ी तकनीकी बाधाओं को दूर किया जाना बाकी है जो मनुष्य आसानी से करते हैं। इसलिए, उदाहरण के लिए, एक मशीन को सबसे सामान्य "सामान्य ज्ञान" प्रदान करने के लिए, इसकी मेमोरी की क्षमता को परिमाण के कई आदेशों तक बढ़ाना, यहां तक कि सबसे आधुनिक कंप्यूटरों के काम को गति देना और सरल विकसित करना आवश्यक होगा ( आप किसी अन्य शब्द के बारे में नहीं सोच सकते) सॉफ्टवेयर। सैन्य उपयोग के लिए, कंप्यूटरों को बहुत छोटा होना चाहिए और युद्ध की परिस्थितियों का सामना करने में सक्षम होना चाहिए। हालाँकि, कृत्रिम बुद्धिमत्ता के विकास का वर्तमान स्तर अभी भी पूरी तरह से स्वायत्त रोबोट के निर्माण की अनुमति नहीं देता है, विशेषज्ञ युद्ध के मैदान के भविष्य के रोबोटीकरण की संभावनाओं के बारे में आशावादी हैं।